

مفهوم تعیین موقعیت
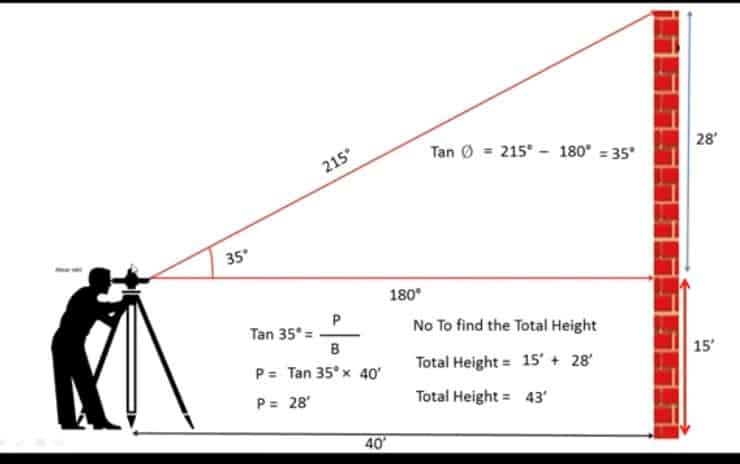
یکی از این روش ها تعیین موقعیت با دوربین توتال است، که با دوربین توتال به یک جهت مشخص توجه نموده ،مختصات نقطه را نسبت به یک نقطه دیگر دریافت می کنیم.
یا به واسطه تیودولیت زاویه و فاصله را میخوانیم و بعدا محاسبات را دستی انجام می دهیم و موقعیت آن نقطه را مشخص می کنیم، مانند تصویر زیر:
نحوه تعیین موقعیت با سامانه های ماهواره ای
میتوان مختصات زمینی را راحت بدست آورد.
این روش کاملا مبتنی بر اندازه گیری زمان است و از طرفی ساعتی که روی ماهواره هاست از نوع ساعت اتمی است ولی ساعت گیرنده از نوع کوارتس است که دقت ساعت اتمی را ندارد.
با توجه به اینکه از طریق سرعت نور فاصله را بدست می آوریم، یک ثانیه خطا باعث ایجاد 300 هزار متر خطا در یک طول می شود، به همین خاطر است که یک ماهواره چهارم هم در نظر میگیریم که دقت کار ما را بالا ببرد؛
با خواندن طول d4 خطای ساعت گیرنده را نیز به عنوان مجهول وارد معادله می کنیم، که در نتیجه می شود چهار معادله با چهار مجهول و از این طریق مختصات گیرنده زمینی را با دقت خوب بدست می آوریم.
ولی این روش که بر مبنای کد و زمان است در بهترین حالت 3 متر دقت دارد.
در نتیجه برای حل کردن این مشکل از خواندن موج حامل استفاده می کنیم، همان موجی که کد و زمان را با خودش از ماواره به گیرنده زمینی آورد.
با اندازه گیری تعداد موج کامل و موج های نصفه که نوسان را کامل نکرده این طول را بدست می آوریم. این همان کاری است که گیرنده های نقشه برداری انجام می دهند و ما را به دقت چند میلی متر می رسانند.
بپس از طریق اندازه گیری زمان به دقت سه متر می رسیم، همان کاری که گوشی های موبالمان انجام می دهد، و از طریق اندازه گیری موج حامل به دقت های چند میلی می رسیم که در کارهای نقشه برداری استفاده می شود.
سامانه های تعیین موقعیت GNSS
ما به صورت عادت از سامانه تعیین موقعیت تحت عنوان GPS یاد می کنیم ولی در واقع GPS تنها سامانه تعیین موقعیت نیست.
حالا چندین سامانه برای تعیین موقعیت وجود دارد و بهتر است که دیگر سامانه ها را بشناسیم و با آنها آشنا شویم؛
در مجموع به سامانه هایی که تعیین موقعیت را انجام می دهند Global Navigation Satellite System (GNSS) گفته می شود.

1_.سامانه GPS
GPS اولین سامانه تعیین موقعیت است که در سال 1986 اندازی شده و شروع به کار کرد. این سامانه متعلق به کشور امریکا است.
GPS به تعداد 32 ماهواره فعال و یک ماهواره ذخیره به روی مدار زمین دارد. در صورتی که برای هر کدام از ماهواره ها اتفاقی پیش بیاید این ماهواره ذخیره به صورت اتومات جایگزین میشود.
2_سامانه GLONASS
این سامانه چند سال بعد از GPS توسط شوروی سابق در رقابت با امریکا راه اندازی شد و بعد از مدتی از کار افتاد، ولی دوباره کشور روسیه بروز رسانیش کرد و حالا به خوبی کار میکند. این سامانه به تعداد 24 عدد ماهواره فعال در مدار زمین دارد.
3_سامانه GALIEO
سامانه GALIEO متعلق به اتحادیه اروپاست. هدف اولیه ایجاد این سامانه برای هوا شناسی بود اما الان می توانیم برای تعیین موقعیت از آن استفاده کنیم و دقت خوبی دارد. این سامانه به تعداد 27 ماهواره فعال در مدار زمین دارد.
4_سامانه COMPASS
سامانه COMPASS یا BeiDou بیدو متعلق به کشور چین است که تعداد ماهواره های این سیستم بشتر از تعداد ماهواره سامانه GPS است و به خوبی دارد کار می کند . این سامانه به تعداد 35 ماهواره فعال در مدار زمین دارد.
5_سامانه QZSS
QZSS متعلق به کشور ژاپن است و یک سامانه محلی است یعنی فقط در کشور ژاپن موقعیت را تعیین می کند. این سامانه 4 ماهواره فعال در مدار زمین دارد
6_سامانه IRNSS
IRNSS هم یک سامانه محلی متعلق به کشور هند است
فرکانس سامانه های ماهواره ای
هر سامانه در چند فرکانس مشخص اطلاعات را به سمت گیرنده های زمینی ارسال می کند.
مثلا ماهواره GPS فرکانس های L1، L2، L5 را به سمت زمین ارسال می کند.
GPS ابتدا تنها یک فرکانس L1 را ارسال می کرد که دستگاه های آن وقت را تک فرکانسه می گفتیم. بعدا فرکانس L2 به GPS اضافه شد که همزمان با آن گیرنده های دو فرکانسه شاخته شد. مدتی بعد هم فرکانس L5 به GPS اضافه شد که همزمان با آن سامانه گلوناس هم شروع به کار کرد و به همین ترتیب به مرور زمان هر سامانه چند فرکانس را ارسال می کند.
حالا همانطور که در تصویر بالا می بینید، گیرنده های ما فرکانس های L ,E ,G ,B را از سامانه های مختلف دریافت می کنند و بخاطر همین این گیرنده ها را چند فرکانسه می گویند.
دلیل ارسال این طول موجهای مختلف چیست؟
اصلی ترین عامل خطای تعیین موقعیت به روش ماهواره ای، لایه یونسفر است.
این لایه یونسفر یک لایه پخاش(دیفریکتیف) است و تاثیر آن بر روی طول موج ها و فرکانس های مختلف، متفاوت است.
درنتیجه در ماهواره ها از طول موج های متفاوت استفاده کردند تا بتوانند تاثیر این لایه را مدلسازی کرده و تا حد خیلی زیادی کاهش دهند؛ به همین دلیل است که گیرنده های چند فرکانسه دقت بیشتری نسبت به گیرنده های تک فرکانسه دارند.
بخش هایی تشکیل دهنده سامانه های تعیین موقعیت ماهواره ای GNSS
بطور کلی هر سامانه تعیین موقعیت ماهواره سه بخش اصلی دارد.
- بخش فضایی که همان ماهواره است که اطلاعات را به کاربران زمینی ارسال می کند.
- بخش کنترل زمینی که تصحیحات را به ماهواره ها ارسال میکند و وضعیت ماهواره ها را رصد میکند.
- بخش کاربران زمینی که از گیرنده های GNSS استفاده میکند.
روش های تعیین موقعیت با سامانه های تعیین موقعیت ماهواره ای GNSS
بطور کلی چهار روش اصلی تعیین موقعییت ماهواره ای داریم:
- استاتیک
- RTK
- PPK
- O-RTK یا آنلاین RTK که شامل سامانه های شمیم هدا و سامانه های مشابه است.
در ادامه هر روش را بررسی میکنیم و کاربردهای آنرا خواهیم دید.
تعیین موقعیت استاتیک
اگر بخواهیم روش استاتیک را به شکل ساده بیان نماییم؛ در حقیقت همان پیمایش بستن سنتی است که برای مختصات کردن بتن های بنچمارک ها از آن استفاده میشود.
دقت روش استاتیک بسیار عالی است و تنها روشی است که امکان سرشکن کردن مشاهداتمان را می دهد.
روش کار تعیین موقعیت استاتیک
روش کار تعیین موقعیت استاتیک به این شکل است که باید روی ایستگاه ها به صورت همزمان سوار باشیم و به طور همزمان مشاهده انجام بدهیم و طول مدت زمان مشاهدات باید طبق استاندارد باشد.
در ایران استاندارد سازمان نقشه برداری، 10 دقیقه برای گیرنده های دو فرکانسه است. 10 دقیقه به عنوان پایه به اضافه یک دقیقه برای هر کیلومتر.
مثلا اگر بین دو بنچمارک شما 7 کلومتر فاصله باشد باید حداقل 17 دقیقه بین این دو بتن بنچمارک مشاهده مشترک داشته باشیم.
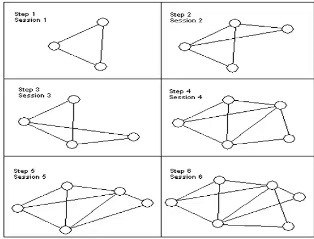
با این مشاهده مشترک که BASE LINE بیس لاین ها تشکیل می شود و با تشکیل BASE LINE ها باید مثلث ها را تشکیل بدهیم و با این اساس که هر نقطه ما باید حداقل در یک مثلث شرکت داشته باشه. زمانیکه یک نقطه در یک مثلث شرکت داشته باشد، میتوانیم آنرا سرشکنی بکنیم،می توانیم با نرم افزار مختلف این کار را انجام بدهیم.
تعیین موقعیت RTK
در این روش حداقل به دو گیرنده نیازمند هستیم که یک گیرنده BASE است و روی ایستگاه معلوم یا رفرنس ما قرار میگیرد و مختصات تصحیح شده را به گیرنده ROVER که گیرنده متحرک است ارسال می کند.
روش کار تعیین موقعیت RTK
نحو کار تعیین موقعیت RTK به این شکل است که ما یک گیرنده را می بریم روی ایستگاه رفرنس که مختصات این ایستگاه از قبل معلوم است(یا از ایستگاه های کارفرما است یا خودمان به روش استاتیک مختصات دارش کردیم یا از ایستگاه های سازمان نقشه برداری است) مستقر می شویم.
بعد از مستقر شدن دستگاه خود را میزاریم و افزونه رادیویی گیرنده را فعال می کنیم. بعد به نرم افزار گیرنده مختصات دقیق همان نقطه را می دهیم.
این گیرنده از طریق مقایسه دو تا مختصات، یکی از مختصات همان مختصاتی که ما به نرم افزار دادیم و مختصات دوم مختصاتی است که خود گیرنده از طریق مشاهدات رادیویی به دست آورده، اختلافشان را محاسبه می کند. این اختلاف می شود همان شیفت. این شیفت را همراه با تصحیحات از طریق ارتباط رادیویی ارسال میکند به گیرنده ROVER. روی ROVER نیز یک گیرنده رادیویی قرار دارد که تصحیحات ایستگاه BASE را دریافت میکند و روی مختصاتی که خودش از ماهواره ها بدست آورده اعمال می کند و مختصات دقیق آن نقطه را بدست می آورد.
در این روش ارتباط بین BASE و ROVER از طریق رادیو وصل میشود و نباید فاصله بین BASE و ROVER بشتر از 5 کیلومتر باشد. اگر این فاصله از این بیشتر شود ، ROVER نمیتواند تصحیحات را دریافت کرده و مختصات دقیق را به ما اعلام کند.
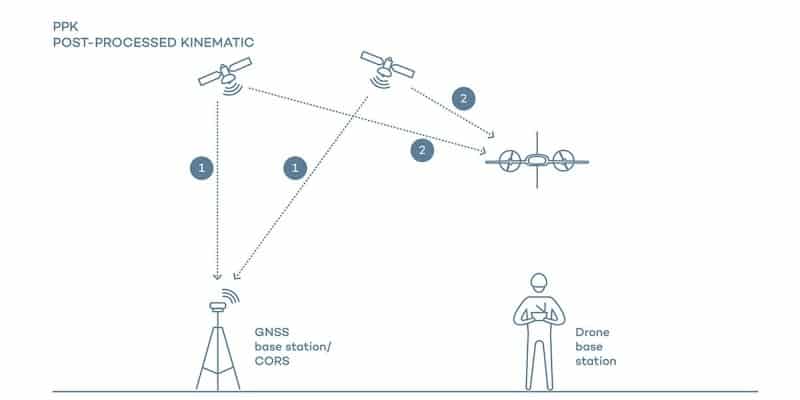
روش تعیین موقعیت PPK
روش PPK تقریبا مشابه روش RTK است، که یک دستگاه روی BASE قرار میگیرد و یک یا چند دستگاه به عنوان ROVER کار میکند.
فرق این روش با RTK در این است که بین BASE و ROVER در محل کار ارتباط رادیویی برقرار نمیشه و در نرم افزار بین دیتاهای BASE و ROVER ایجاد می شود و تصحیحات را خود ما در نرم افزار روی این دیتاها وارد می کنیم.
روش کار PPK به این شکل است که باز یک گیرنده را بر روی ایستگاه معلوم قرار می دهیم و اینبار برداشت را ذخیره می کنیم و مثل حالت RTK به دشتگاه ROVER ارسال نکند. با دستگاه ROVER هم مثل RTK برداشت را انجام می دهیم.
پس از اتمام کار تمام مختصات ها را وارد نرم افزار می کنیم. بعد به نرم افزار مختصات دقیق نقطه BASE که گیرنده ما برداشت کرده را می دهیم و نرم افزار خودش شیفت را حساب کرده و بر روی داده هایی که از گیرنده های ROVER بدست آمده اعمال می کند.
اصلی ترین مزیت روش PPK این است نیازی به ارتباط رادیویی بین BASE و ROVER نیست پس محدویت فاصله شان 5 کیلومتر نیست و می تواند تا حدود 25 الی 30 کیلومتر کارایی داشته باشد.
بزرگترین نقص PPK این است که برخلاف روش RTK مختصات دقیق برداشتی را در لحظه اندازه گیری نمیتوانیم بیبینم. فقط مختصات دقیق را میتوانیم در دفتر کار مشاهده کنیم.
روش O-RTK
این روش مشابه دو روش قبلی است با این تفاوت که در این روش، BASE از طرف ما تعیین نمی شود بلکه از طرف سازمانی دولتی یا خصوصی تعیین میشود و ما فقط ازش استفاده می کنیم.
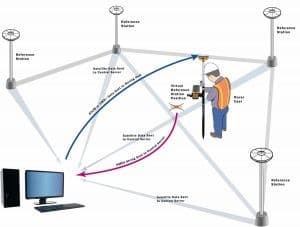
مثل سامانه شمیم که اکثرا با آن آشنا هستند که برای سازمان ثبت است. سازمان ثبت در حیات یا پشت بام ادارات خودش یک گیرنده قرار داده و اون بتنی که گیرنده بر رویش است را از قبل مختصات دار کرده و اون گیرنده تصحیحات را دریافت و محاسبه می کند و بجای اینکه با ارتباط رادیویی به دستگاه ROVER ارسال کند در یک سرور آپلود می کند.
گیرنده ما هم به اینترنت متصل می شود و با زدن نام کاربری و پسوورد در کنترلر گیرنده، به سرور سازمان ثبت متصل میشه و تصحیحات رو دانلود می کنه و اعمالش میکنه بر روی نتایجی که با مشاهدات ماهوراه ای بدست آورده.
باید به این نکته اشاره کنیم که ارتفاعی که از شمیم بدست می آید اصلا قابل استناد نیست و خطای ارتفاعی آن زیاد است.
مزایا روش O-RTK این است که دقت آن مثل RTK است و نیاز نیست که خودمان یک BASE بزنیم.
و عیب آن این است به اینترنت نیاز دارد.
البته اگر اینترنت هم نباشد می تونیم از روش PPK برداشت بکنیم و دیتامونو به سایت سامانه شمیم بدیم و مختصات دقیق رو از اونها بگیریم که این روش هم مشکلات خاص خودش رو داره. مثلا باید فاصلمون رو از ایستگاه بیس سازمان بدونیم و این فاصله نباید بیش از اندازه باشه و ….
, نقشه برداری گیلان , نقشه برداری در گیلان , بهترین نقشه بردار در گیلان , بهترین شرکت نقشه برداری در گیلان , نقشه برداری در شفت , قیمت نقشه برداری در گیلان , قیمت نقشه برداری در شفت , خدمات نقشه برداری در شفت , مهندس نقشه بردار در گیلان , شرکت مهندسین برتر مختصات یاب خزر در گیلان